GW を利用してシンセリコーダーの改良をしていました。
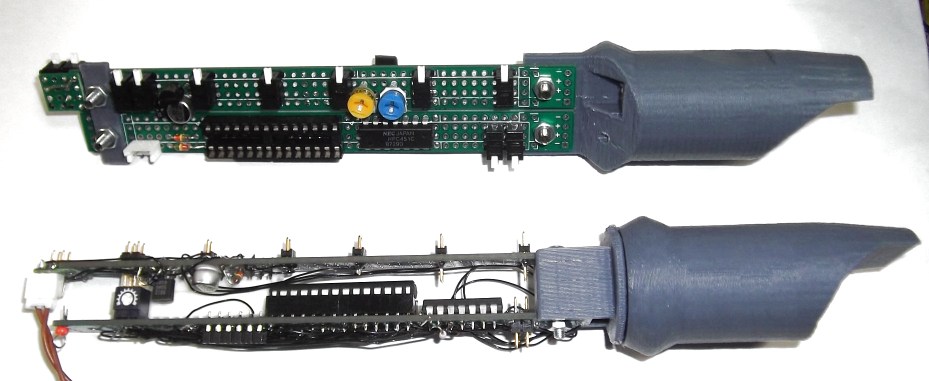
上がプロトタイプ1号機、下がプロトタイプ2号機です。
1号機では指検出にメカニカルスイッチを使用していましたが、2号機ではタッチセンサに変更しています。
あわせて、基板配置の変更、センサキャリブレーションの自動化と、マウスピースの設計変更を行いました。
マウスピース部分は 3D プリンタで出力しています。
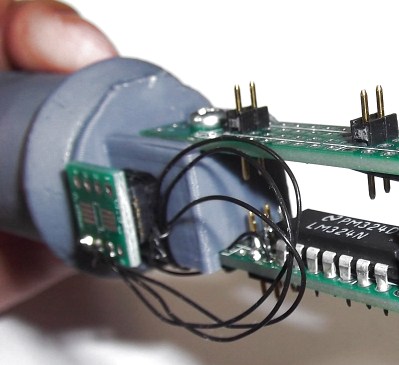
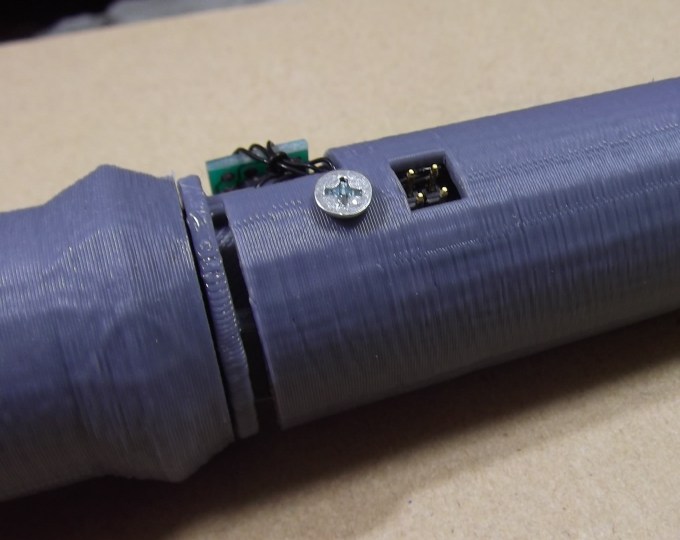
このプロジェクトではおもちゃではなく楽器を作りたいので、息の検出は当然肝となる部分で、いろいろ試した結果気圧センサを使用しています。
マウスピースと気圧センサは試行錯誤の結果、上記写真のように取り付けています。
気圧センサの出力は、横にある LM324 で増幅してマイコン (ATmega8) に入力されます。
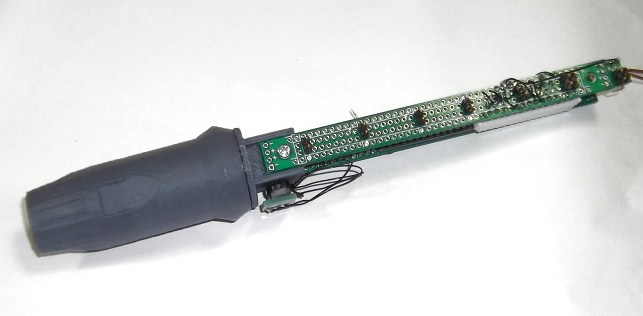
基板は以前製作した便利な細長ユニバーサル基板を使用しています。
指使いを検出するタッチセンサには上記写真に見えるように、ピンヘッダを使っています。
タッチセンサ(メカニカルな接点を使用しないスイッチ)は大きく分けて非接触型と接触型に区別されます。
静電容量を利用する非接触型はそれなりに広くパターンを設ける必要があり、リコーダーのサミング(穴を半分だけ空けること)検出が難しそうなので採用しませんでした。
接触型にもいろいろあり、商用周波数からのノイズを拾うものや、接触抵抗を検出するものがありますが、今回はセンサ端子の浮遊容量に電荷を貯め、端子の電荷が指を通して放電されることを検出する方式を採用しています。
上から。
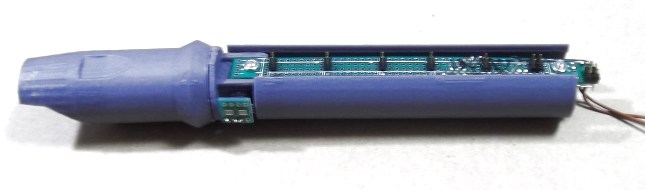
基板に誤って触れるとセンサが誤検出するので、サイドカバーをつくってつけました。
どうも直径に対して長さが足りない気がしますが、「リコーダー 寸法」とかで検索しても値が出てこないのであまり気にしないことにします。
下側の穴(左手親指)はサミング検出のため、上記写真のように 2 組のセンサ接点を配置しています。

ちょっと演奏しづらかったので、片方の接点のみ位置を微妙に調整しました。
これで大分、リアルリコーダーの感覚に近づきました。